
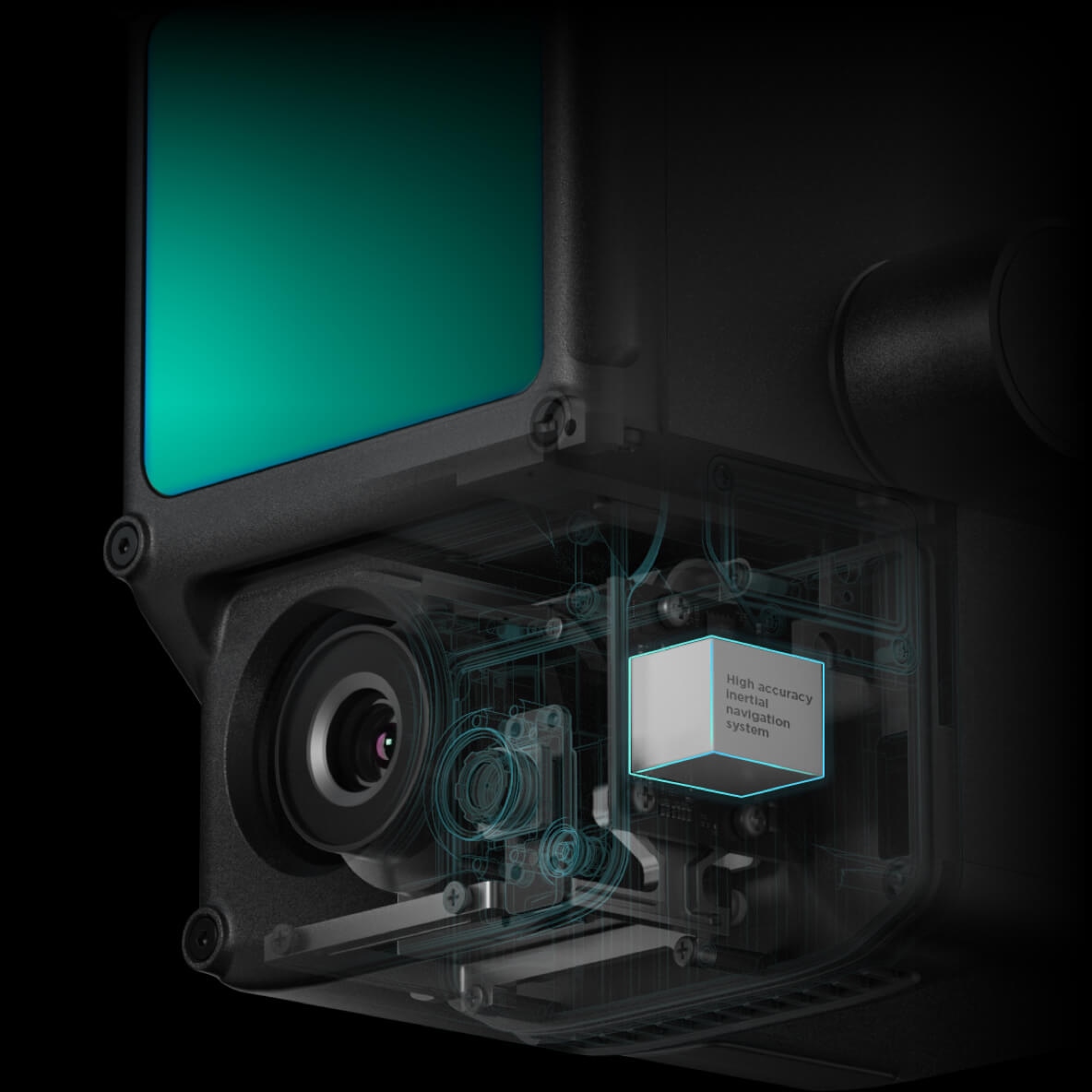
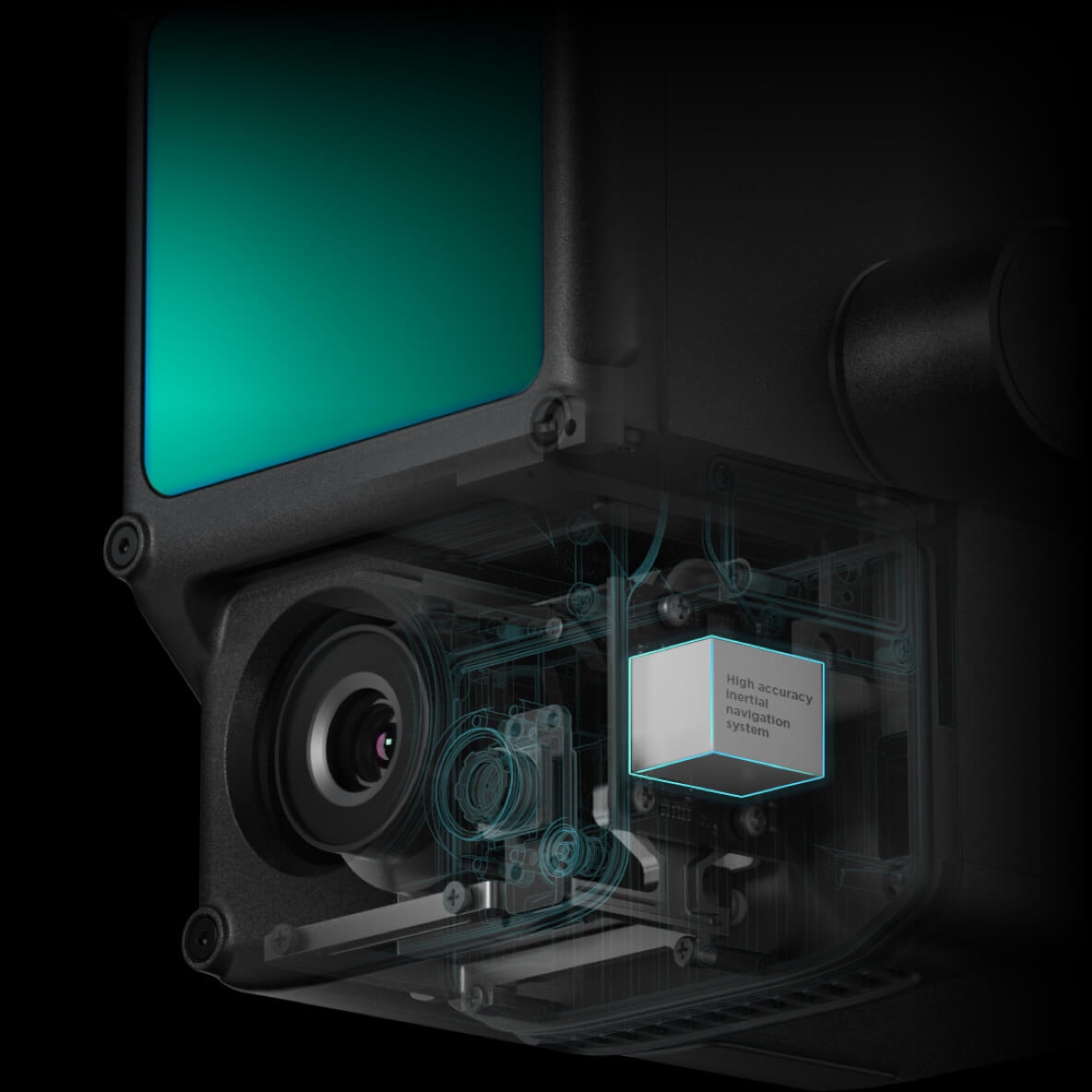
В Zenmuse L1 интегрированы модуль лидара Livox Lidar, высокоточный блок IMU и камера с 1-дюймовым экраном CMOS, установленная на 3-осевом гиростабилизаторе. При использовании L1 с Matrice 300 RTK и DJI Terra получается полное решение, способное весь день предоставлять трехмерные данные в реальном времени, эффективно регистрировать детали сложных конструкций и создавать высокоточные реконструированные модели.
Имеет встроенный модуль лидара,
курсовую камеру и высокоточный узел IMU
Высокая эффективность
2 км2
за один полет [1]
Высокая точность
Вертикальная точность: 5 см /
Горизонтальная точность: 10 см [2]
Частота точек: 240 000 точек/с
Поддерживает 3 возврата [3]
Диапазон распознавания: 450 м
(80% отражающие свойства, 0 килолюкс)
Уровень защиты корпуса IP44
Облако точек LiveView
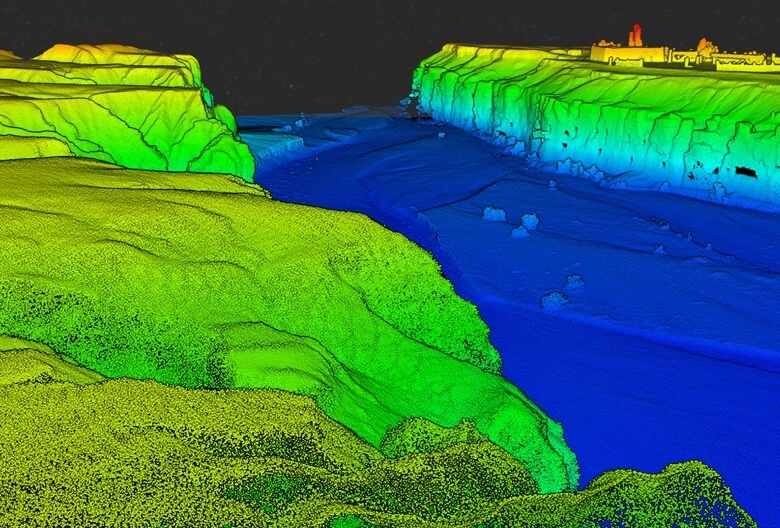
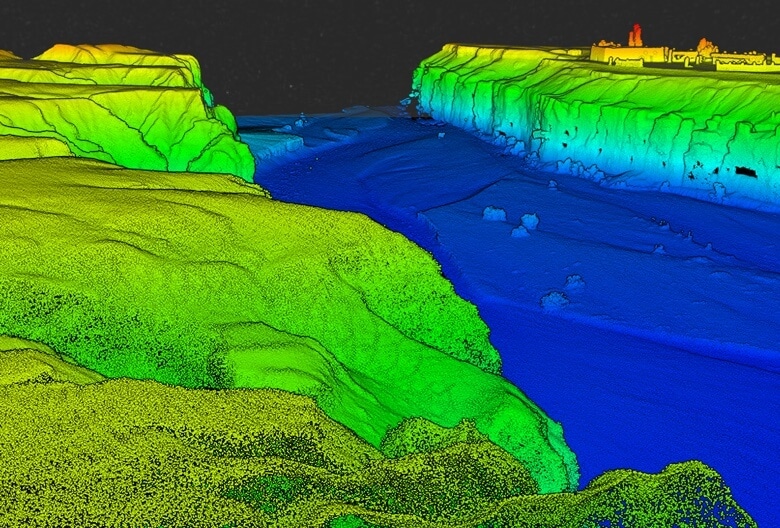
Генерируйте полноцветные модели облака точек в формате True Color или собирайте данные для облака точек площадью 2 км2 за один полет [1] с помощью модуля лидара на раме Livox с полем обзора 70° и камерой видимого света с 1-дюймовым сенсором.
Рендеринг реконструкций с точностью до сантиметра благодаря высокоточному узлу IMU, датчику видения для точности позиционирования и интеграции данных GNSS.
Рейтинг защиты IP44 позволяет использовать L1 в условиях дождя или тумана. Метод активного сканирования лидара позволяет выполнять ночные полеты.
Быстро создавайте топографические карты, используя точные цифровые модели высот.
Управляйте полным жизненным циклом проектов, используя высокоточные облака точек и 3D-модели.
Собирайте важные аналитические данные в реальном времени в любое время суток, используя облака точек в формате true color.
Получайте информацию о ситуации и разведывательные данные в реальном времени, чтобы принимать обоснованные решения на месте.
Моделируйте разреженные или сложные структуры для эффективного и безопасного управления.
Получайте информацию по плотности растительности, объему запасов, ширине крон и тенденциям роста.

В Zenmuse L1 интегрированы модуль лидара Livox Lidar, высокоточный блок IMU и камера с 1-дюймовым экраном CMOS, установленная на 3-осевом гиростабилизаторе. При использовании L1 с Matrice 300 RTK и DJI Terra получается полное решение, способное весь день предоставлять трехмерные данные в реальном времени, эффективно регистрировать детали сложных конструкций и создавать высокоточные реконструированные модели.
Имеет встроенный модуль лидара,
курсовую камеру и высокоточный узел IMU
Высокая эффективность
2 км2
за один полет [1]
Высокая точность
Вертикальная точность: 5 см /
Горизонтальная точность: 10 см [2]
Частота точек: 240 000 точек/с
Поддерживает 3 возврата [3]
Диапазон распознавания: 450 м
(80% отражающие свойства, 0 килолюкс)
Уровень защиты корпуса IP44
Облако точек LiveView
- Рамочный лидар с эффектностью создания облака точек до 100%
- Диапазон обнаружения: 450 м (отражаемость 80%, 0 килолюкс) / 190 м (отражаемость 10%, 100 килолюкс)
- Фактическая частота точек: 240 000 точек/с
- Поддерживает 3 возврата [3]
- Режим линейного сканирования и режим неповторяющегося сканирования
- 20 МП
- 1-дюймовый CMOS
- Механический затвор
- Точность: 0,025° (вращение/наклон) / 0,08° (поворот)
- Датчик видения для обеспечения точности позиционирования
- GNSS, IMU, слияние данных RGB
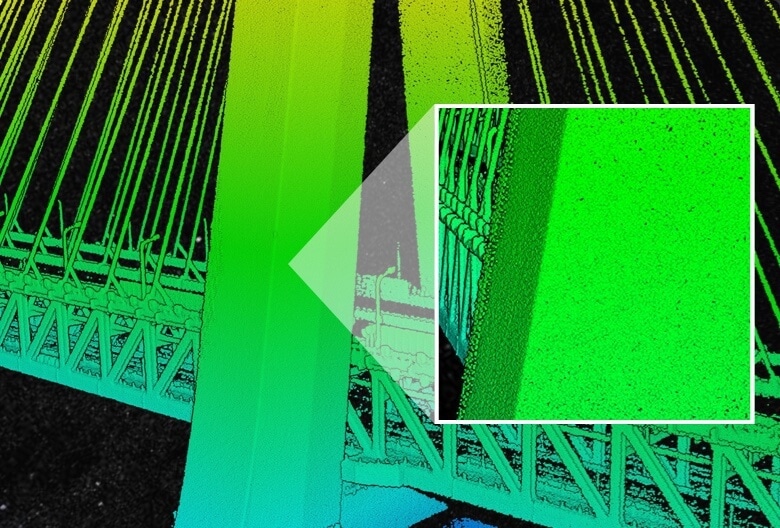
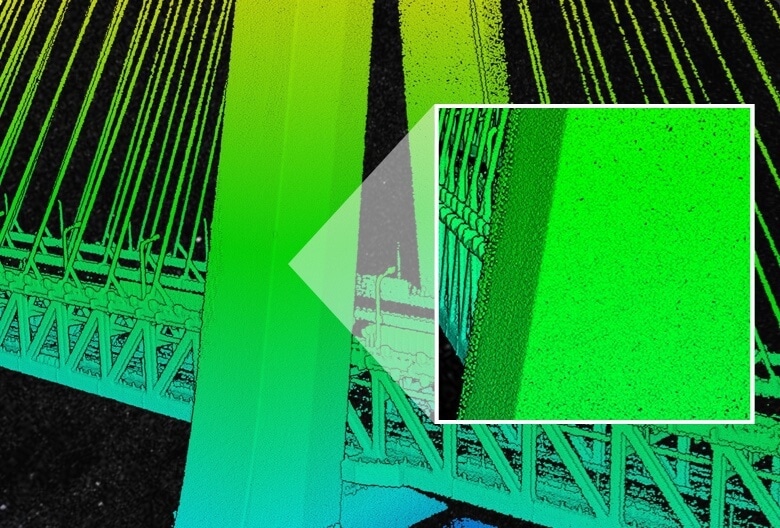
Облака точек в реальном времени позволяют немедленно получать данные на мести, чтобы операторы имели данные для быстрого принятия важных решений.
Также вы можете проверить качество работы, проверяя данные облака точек после каждого полета.
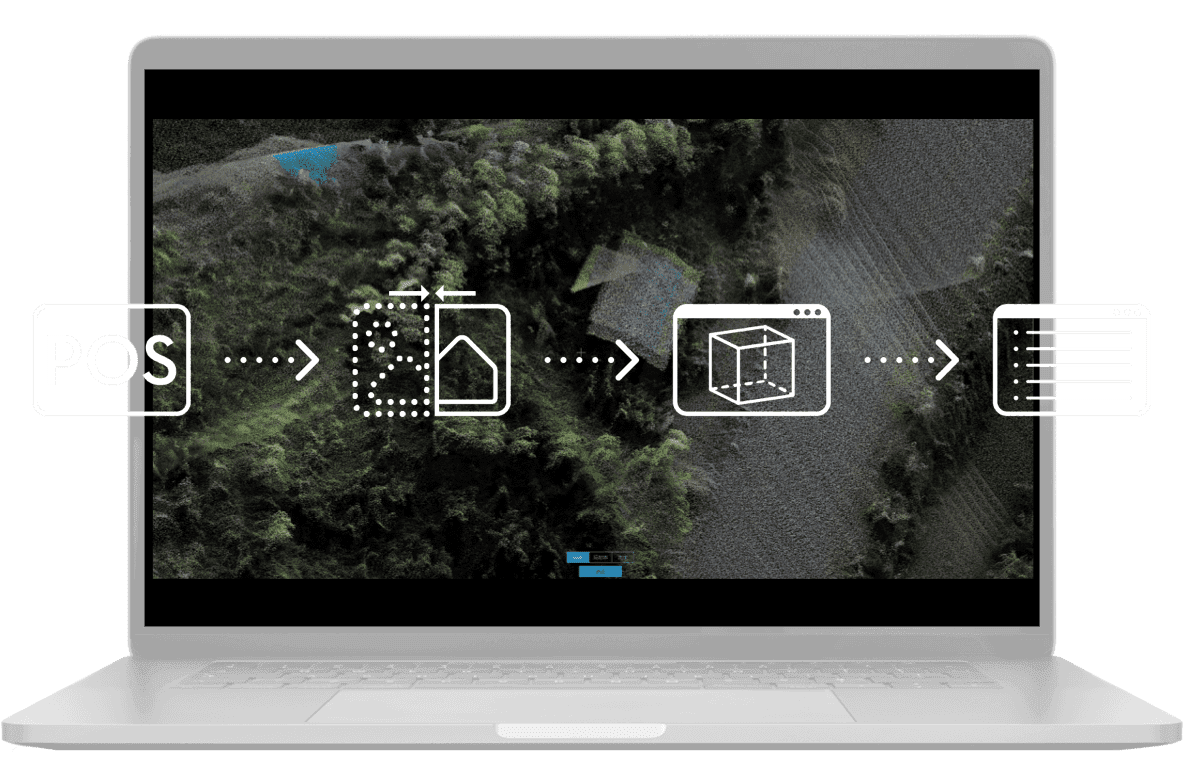
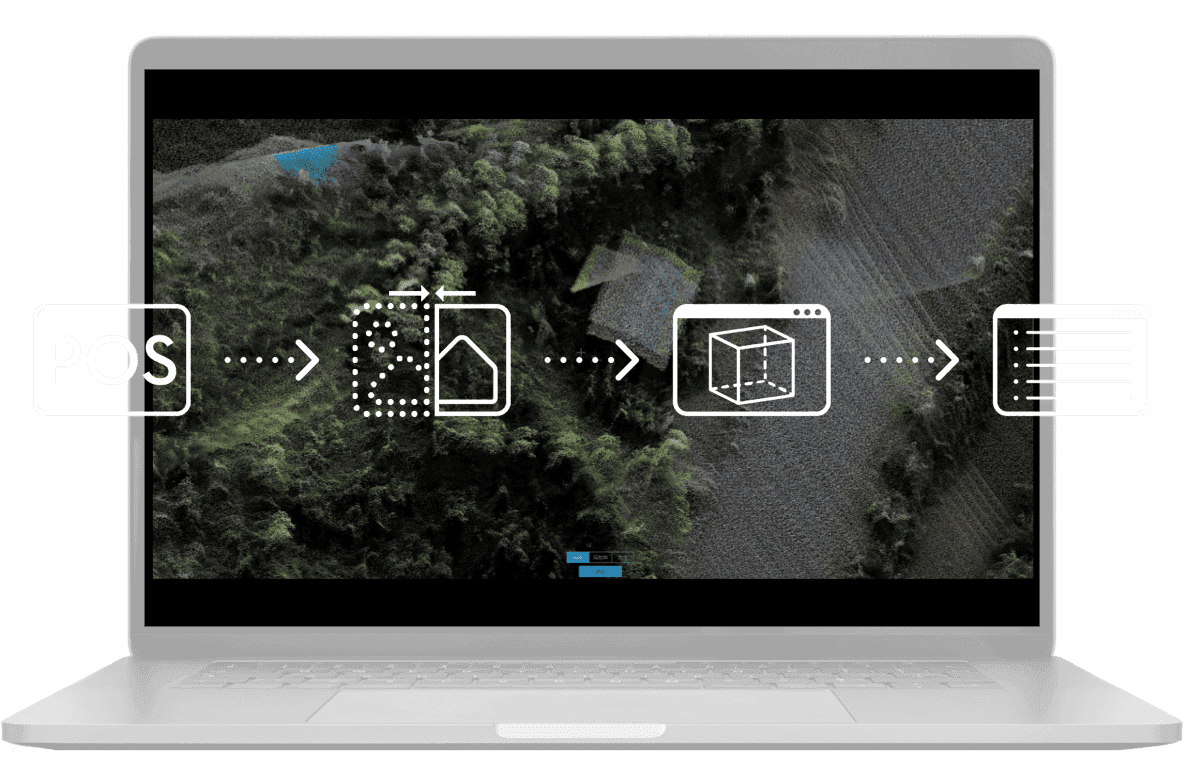
Сбор и передача основных размеров для модели облака точек с использованием измерений и аннотации.
DJI Terra объединяет данные IMU и GNSS для облака точек и расчета видимого света, а также проводит расчеты данных POS, чтобы вы могли легко генерировать реконструированные модели и отчеты по точности.
Быстро создавайте топографические карты, используя точные цифровые модели высот.
Управляйте полным жизненным циклом проектов, используя высокоточные облака точек и 3D-модели.
Собирайте важные аналитические данные в реальном времени в любое время суток, используя облака точек в формате true color.
Получайте информацию о ситуации и разведывательные данные в реальном времени, чтобы принимать обоснованные решения на месте.
Моделируйте разреженные или сложные структуры для эффективного и безопасного управления.
Получайте информацию по плотности растительности, объему запасов, ширине крон и тенденциям роста.
[1] За 30 минут, при скорости 10 м/с, высоте полета 100 м, доля бокового перекрытия 20%, плотность облака точек > 200 точк/м2.
[2] Высота полета: 50 м
[3] При операции с двумя или тремя возвратами частота точек составляет 480000 точек/с






[1] За 30 минут, при скорости 10 м/с, высоте полета 100 м, доля бокового перекрытия 20%, плотность облака точек > 200 точк/м2.
[2] Высота полета: 50 м
[3] При операции с двумя или тремя возвратами частота точек составляет 480000 точек/с